خاصية التحكم التكيفي في السرعة Adaptive Cruise Control بالسيارات ..كيف تفعلها بشكل صحيح ؟

يُعد نظام التحكم التكيفي في السرعة أو Adaptive Cruise Control واحدًا من أهم تقنيات مساعدة السائق المتقدمة، حيث يعتمد على منظومة من الحساسات والرادارات والكاميرات لتقدير المسافة والفاصل الزمني بين السيارة والمركبات الأخرى، ثم ضبط التسارع والتهدئة بشكل آلي بما يضمن الحفاظ على سرعة ثابتة ومسافة آمنة. ورغم انتشار هذه التقنية في شريحة واسعة من السيارات الحديثة، فإن استخدامها الصحيح يرتبط بمجموعة من الإرشادات العملية التي يجب الالتزام بها، إلى جانب إدراك الحالات التي يُفضل فيها تشغيل النظام وتلك التي يجب تجنب تشغيله فيها، بالإضافة إلى معرفة المزايا والعيوب القائمة على خصائصه التقنية وطريقة تطوره.
كيفية ضبط النظام بالشكل الصحيح
يبدأ الاستخدام السليم للنظام من خلال ضبط السرعة المطلوبة بناءً على حدود السرعة الرسمية لطريق القيادة، ثم تحديد الفاصل الزمني أو مسافة الأمان التي تحددها السيارة عبر أوامر التحكم الموجودة على عجلة القيادة أو على الكونسول. تعتمد دقة الضبط على فهم السائق للوقت الذي يستغرقه النظام للاستجابة عند تباطؤ المركبة الأمامية أو عند زيادة سرعتها، وهو ما يتطلب التأكد من معايرة الحساسات والرادارات وفق الصيانة الدورية، والالتزام بنظافة الجزء الأمامي الذي يحتوي على مستشعرات عمل النظام. وتُعد برمجة مسافة التتبع في مستوياتها المناسبة خطوة مهمة، إذ تُتيح بعض السيارات خيارات زمنية متفاوتة تتراوح غالبًا بين مستوى قصير ومتوسط وطويل، ما يسمح للسائق بتحديد القيمة الملائمة لطبيعة الطريق، خصوصًا مع اختلاف سرعات المركبات وتغير الظروف المحيطة في البيئات الحضرية والسريعة.
متى يُفضل تشغيل خاصية Adaptive Cruise Control
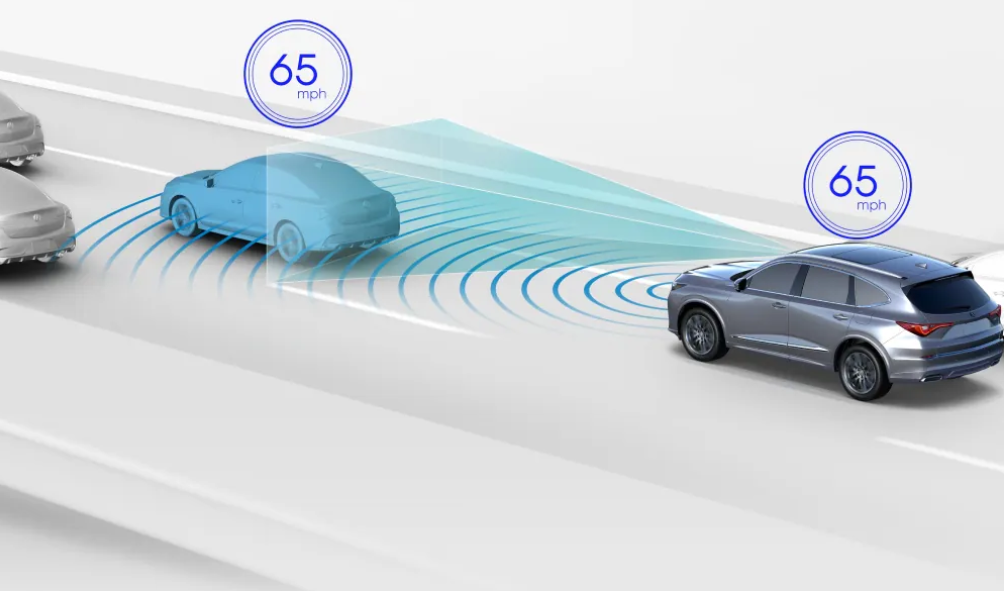
يُنصح باستخدام النظام في الطرق السريعة المستقيمة والممتدة التي تتسم بانسيابية حركة المرور ووضوح المسافات بين السيارات، حيث يستطيع النظام قراءة المركبات الأمامية بشكل واضح وتحليل سرعتها، ثم السيطرة على التسارع أو التباطؤ ضمن الحدود المبرمجة. كما يمكن استخدامه في الرحلات الطويلة التي تتطلب استقرارًا في السرعات وتخفيفًا للإجهاد البدني على السائق، خاصة عندما تكون ظروف الطريق مستقرة وتخلو من التغيرات المفاجئة في حركة المرور. وتصبح فاعلية النظام أكثر وضوحًا في الحالات التي يصعب على السائق الحفاظ فيها على سرعة ثابتة لفترات ممتدة، مع قدرته على متابعة المركبات الأمامية واستشعار سرعتها من خلال منظومة الرادار.
الحالات التي يجب تجنب تشغيل النظام فيها
لا يُفضل تشغيل Adaptive Cruise Control في حالات الازدحام الشديد داخل المدن، خاصة عندما تكون المسافات بين السيارات غير ثابتة وتتغير باستمرار، أو عندما تكون السرعات منخفضة بشكل يصعب معه على النظام توقع حركة المركبات. كما يجب تجنب تشغيله في الطرق التي تتسم بمنحنيات متتابعة أو تضاريس معقدة قد تعيق قراءة الحساسات للمسار أو المركبات. ويُنصح بإيقاف تشغيل النظام في الظروف المناخية غير المستقرة مثل الأمطار الغزيرة أو الضباب الكثيف أو الثلوج، إذ قد تتأثر قدرة الحساسات على قياس المسافات كما ينبغي. وتُعد الطرق غير الممهدة أو التي تحتوي على عوائق سطحية من الحالات التي لا يتوافق معها النظام بسبب محدودية رؤيته وتحليل بيئة القيادة.





المميزات الفنية لنظام Adaptive Cruise Control
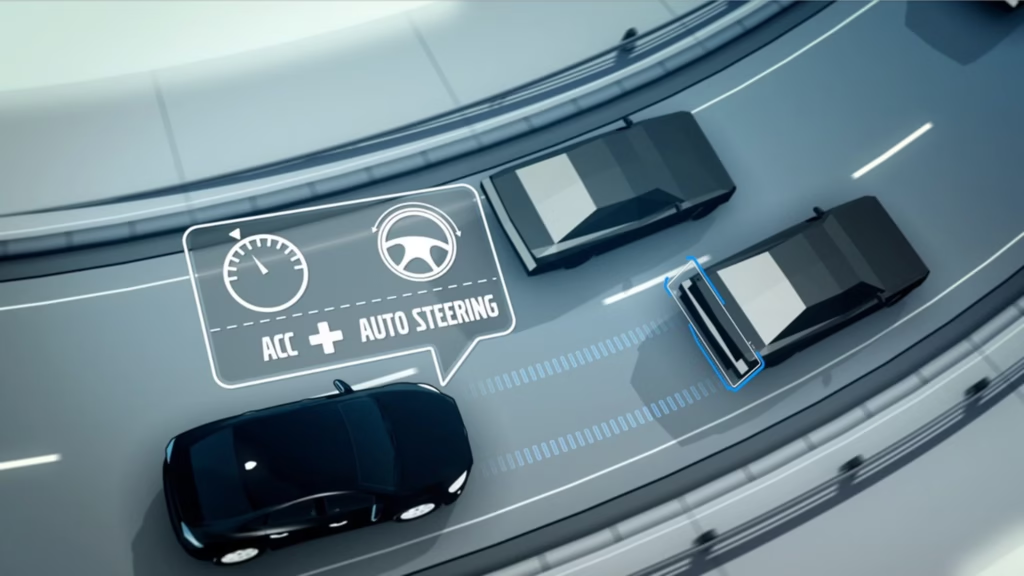
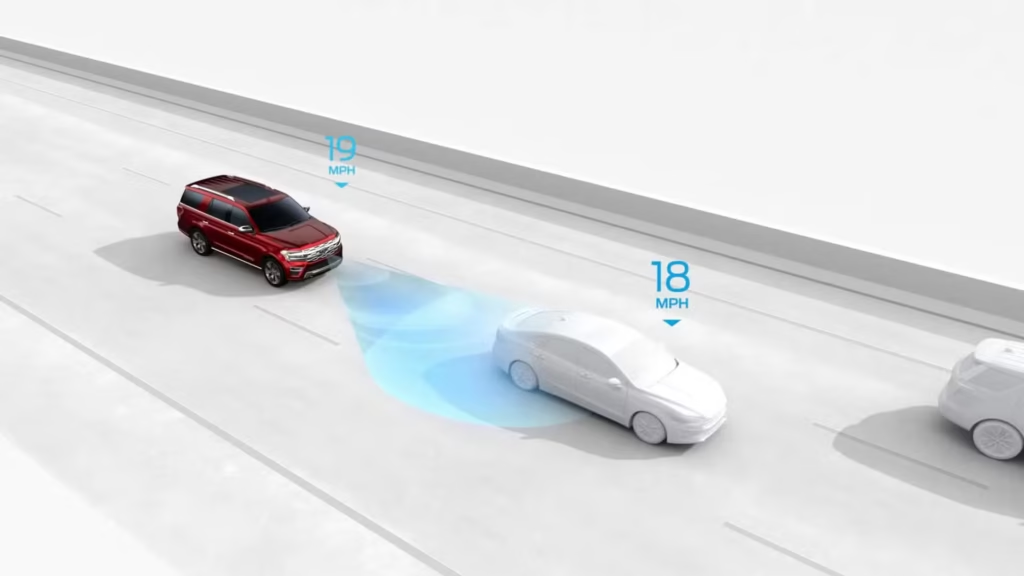
يعتمد النظام على بنية إلكترونية متقدمة تشمل رادار أمامي يراقب حركة المركبات في مجال زمني محدد، وكاميرات مساعدة لتحليل خطوط الطريق، وحاسوبًا مركزيًا يدمج البيانات ويصدر الأوامر إلى وحدة التحكم في السرعة. ويسمح هذا الدمج بالحفاظ على المسافة الزمنية التي يتم ضبطها، والتحكم في التسارع والفرامل بطريقة تتوافق مع المتغيرات أمام السيارة. ويتيح النظام تتبّع المركبات في نطاق سرعات واسعة في بعض الطرازات، كما يمكنه التفاعل عبر أوامر قصيرة عند دخول مركبة إلى المسار أو عند بدء مركبة أمامية في المناورة. وتوفّر بعض النسخ المتطورة خاصية التوقف والانطلاق التلقائي في الازدحام النسبي، وذلك وفق برمجيات تُحدد نسبة التباطؤ والتسارع المسموح بهما.

العيوب والحدود التقنية للنظام
ترتبط العيوب بالقيود التقنية التي تعمل ضمنها المنظومة، إذ يعتمد النظام على استقرار الرؤية وتوافر خط واضح بين السيارة والمركبة الأمامية، ما يجعله أقل فاعلية في الطرق التي تزدحم بالمنحنيات الحادة أو المركبات المتعددة المسار. كما قد يؤثر وجود مركبات ذات ارتفاعات مختلفة أو أحجام غير متناسقة في دقة قراءة الرادار، خصوصًا إذا تواجدت دراجات نارية أو مركبات صغيرة في مسار الرصد. وقد يتأخر النظام في الاستجابة في اللحظات التي تتغير فيها حركة المرور بشكل مفاجئ، خاصة في حالة دخول مركبة أمامية بسرعة منخفضة إلى المسار. وتتعرض حساسات الرادار للخلل في حال تراكم الأتربة أو الثلوج أو المياه عليها، ما يستدعي تنظيفها المستمر حفاظًا على دقة قياس المسافات.